Abstract:
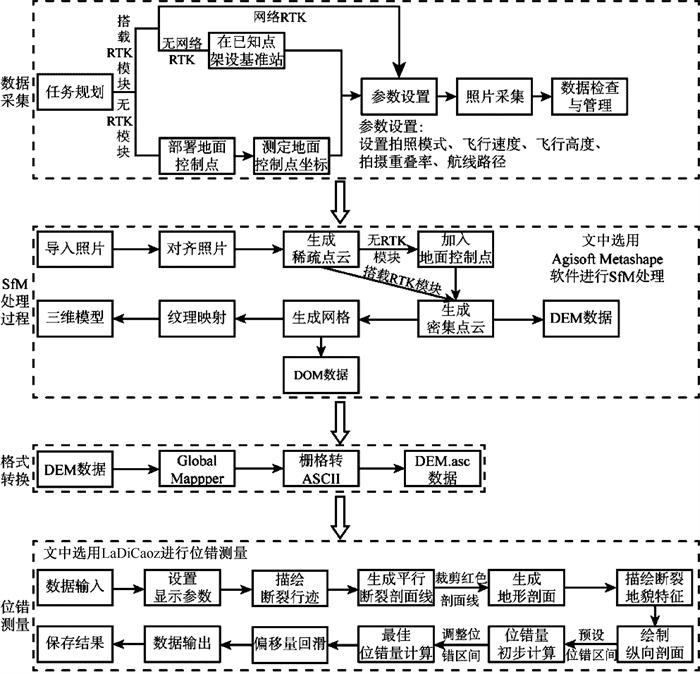
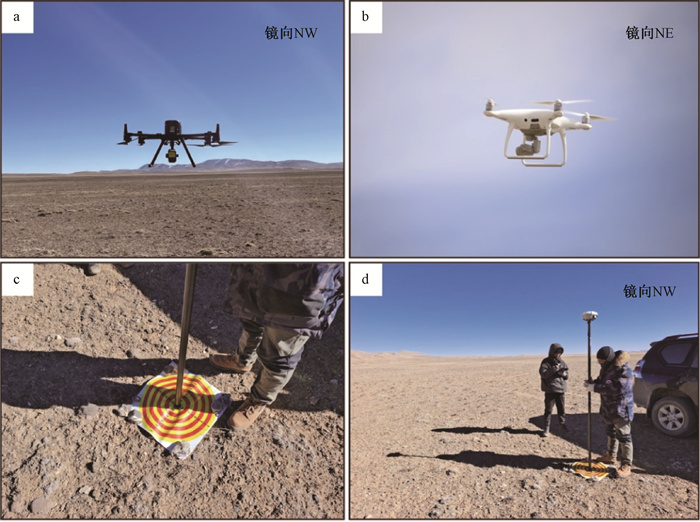
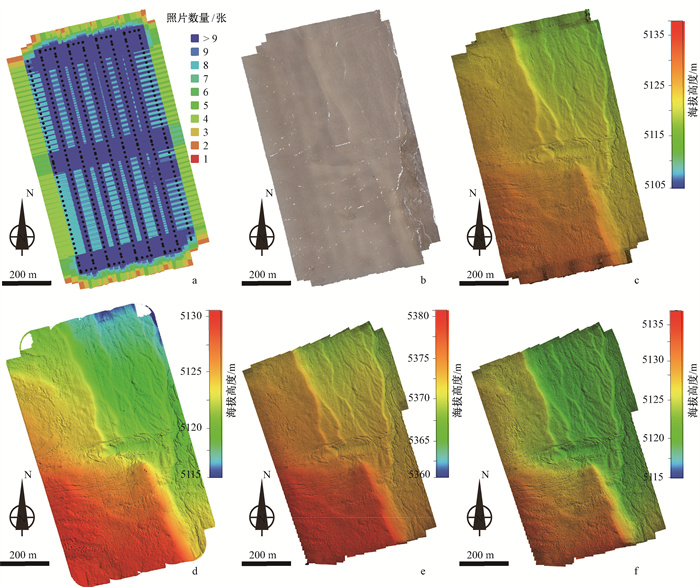
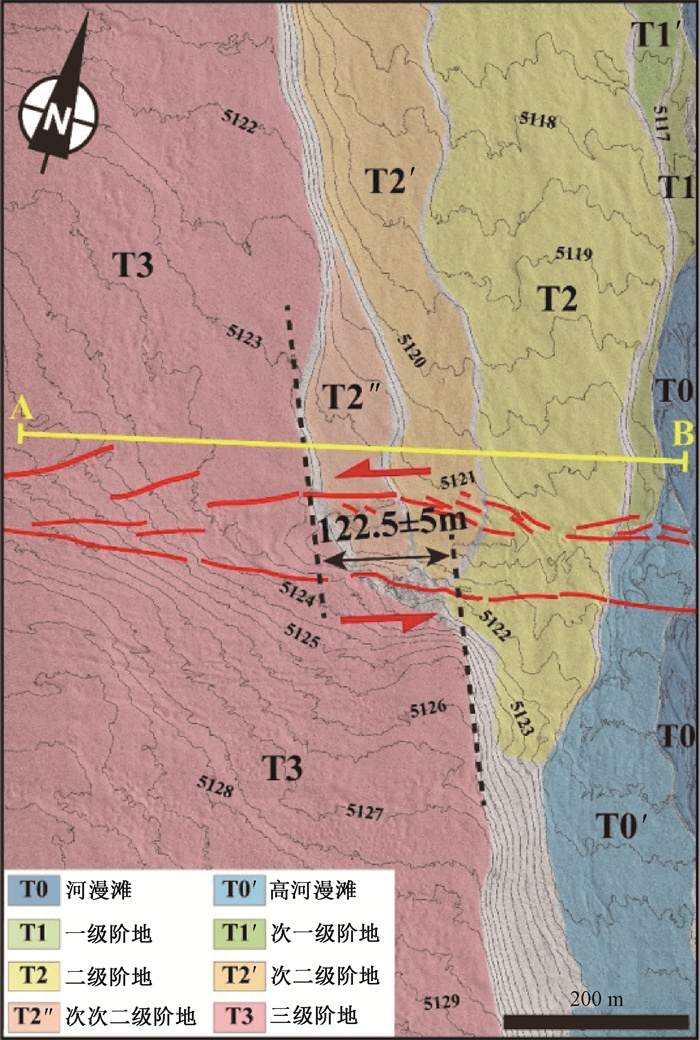
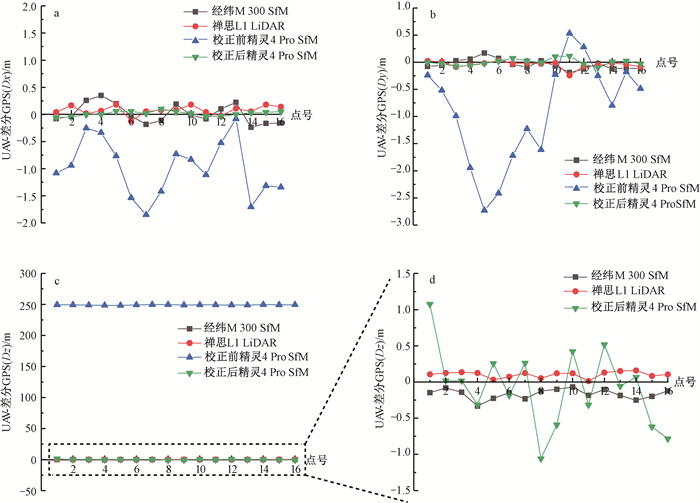
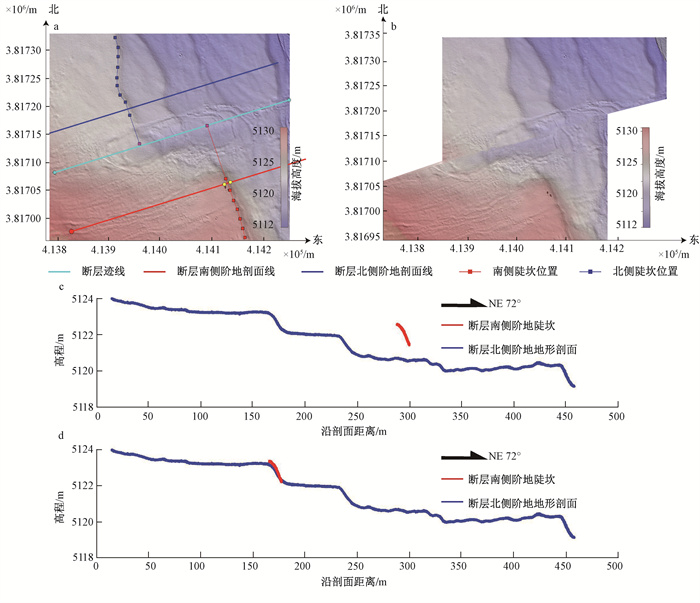
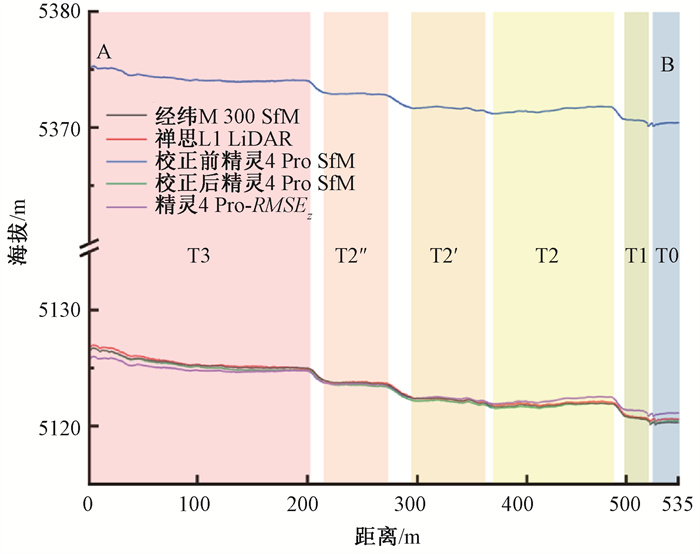
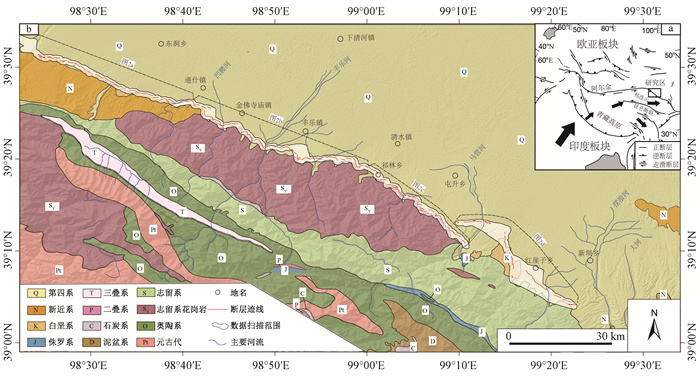
Objective In recent years, UAV (Unmanned Aerial Vehicle) SfM (Structure from Motion) technology has been widely applied as an emerging high-precision 3D topographic data acquisition technique in active tectonics research. However, existing domestic research primarily focuses on UAV platforms without RTK/PPK modules. Over the past two years, RTK and PPK technologies have gradually been introduced to UAV platforms, resulting in changes to field data collection and in-office data processing workflows compared to traditional UAV platforms without RTK/PPK modules. The differences in topographic data quality obtained through SfM processing of aerial photographs from UAV platforms equipped and not equipped with RTK/PPK modules under the same scenes and collection conditions still require investigation. Methods To address these questions and establish a streamlined data collection and processing workflow for different UAV platforms, a site where alluvial terraces are offset by the sinistral Longmu Co fault, northwestern Qinghai-Tibet Plateau, was surveyed using the DJI M300 RTK UAV (equipped with the Zenmuse L1 LiDAR and a 20-megapixel visible light camera) and the DJI Phantom 4 Pro UAV (equipped with a 20-megapixel visible light camera). Through processing the raw data with SfM technology, high-resolution and high-precision DEM and DOM data were obtained for the study area. Additionally, 16 ground control points (checkpoints) were uniformly distributed in the research area, and their coordinates were measured using the Trimble R8 GNSS receiver in RTK mode to compare and validate the differences in data quality obtained by the two platforms. Results The data comparison showed that the visible light camera and LiDAR module carried by the M300 RTK demonstrated high accuracy, with root mean square errors (RMSEs) in the centimeter to decimeter range compared to the RTK-measured ground checkpoints. Compared to SfM data collected at the same time (RMSEX=0.176, RMSEY=0.099, RMSEZ=0.180, RMSEH=0.201, RMSE3D=0.270, unit: m), the Zenmuse L1 LiDAR data exhibited slightly higher accuracy (RMSEX=0.112, RMSEY=0.076, RMSEZ=0.111, RMSEH=0.135, RMSE3D=0.174, unit: m). The uncorrected SfM data from the Phantom 4 Pro had horizontal errors of approximately 1 meter (RMSEX=1.112, RMSEY=1.295, unit: m) and a vertical error of over 200 meters (RMSEZ=249.286, unit: m). After ground control point correction, the accuracy of the Phantom 4 Pro SfM data significantly improved, with RMSE of 0.046 m, 0.058 m, and 0.527 m in the X, Y, and Z directions, respectively. Further analysis of a topographic profile nearly perpendicular to the steep slopes of various terrace risers within the surveyed area revealed that, despite significant elevation discrepancies in the uncorrected Phantom 4 Pro SfM data, it still accurately reflected the relative topographic relief. Subtracting the profile elevation values from their corresponding RMSE, the profile shape closely matched the rest of the data. Based on the acquired DEM data, the displacement of the terrace at this location was measured using LaDiCaoz software, revealing a left-lateral strike-slip displacement of 122.5±5 m and a vertical displacement of 0.8±0.2 m. Conclusion The study results indicate that: (1) UAV SfM method and LiDAR technology have significantly improved the resolution of DOM and DEM, enabling more detailed interpretation and analysis of active faults and related structural landforms; (2) RTK SfM technology overcomes the limitations of using ground control points, providing a higher-precision and more efficient solution for micro-landform measurements in the field of active tectonics research; (3) when absolute three-dimensional coordinates in the study area are not crucial, and only relative terrain variations are required, UAVs without RTK modules can still meet the basic requirements for geomorphic fault displacement measurements in the absence of ground control point constraints; (4) combining UAV SfM technology with traditional fault geomorphology analysis and Quaternary dating techniques in high-precision quantitative active tectonics research can offer robust technical support for analyzing fault activity patterns, seismic hazard, landform evolution, and the occurrence patterns of geological disasters. Significance Through the aforementioned work, workflows for data collection, data processing, and geomorphic fault displacement measurement using SfM methods in active tectonics research were established for both UAV platforms equipped and not equipped with RTK/PPK modules. The fieldwork considerations and data accuracy of UAV SfM methods were analyzed, providing a reference for selecting UAV platforms and rapidly collecting and processing data for similar studies in the future.