

Application of UAV SfM technology in active tectonic research: A case study of the Longmu Co Fault, Northwestern Qinghai-Tibet Plateau
-
摘要: 为探讨搭载与未搭载实时动态差分技术/动态后处理技术(RTK/PPK)模块的无人机平台通过运动恢复结构(SfM)方法处理获得的数字高程模型(DEM)数据质量差异,以及建立不同无人机平台野外数据采集和室内数据处理过程的快速流程,利用大疆经纬M 300 RTK无人机(搭载禅思L1激光雷达(LiDAR)和测绘相机)与大疆精灵4 Pro无人机(搭载可见光相机)分别对青藏高原西北部龙木错断裂上1处位错阶地进行了数据采集,获得了该处高分辨率、高精度DEM数据和数字正射影像图(DOM)数据。对比结果显示,M 300 RTK无人机平台L1负载系统获得的LiDAR和SfM地形数据精度接近,两者在约100 m的飞行高度获得的DEM数据在水平和垂直方向的均方差分别为0.135 m、0.111 m和0.201 m、0.180 m;无RTK模块的精灵4 Pro无人机获取的DEM数据虽然绝对精度较差(水平和垂直方向均方差分别为1.707 m和249.280 m),但其反映的相对地形与实际地形接近,经过地面控制点校正后精度可以达到分米级。研究表明,RTK SfM技术克服了使用地面控制点的局限性,为活动构造研究领域微地貌测量提供了更高精度、更高效率的解决方案。当对测区的绝对三维坐标要求不高,仅需相对的地形起伏时,未搭载RTK模块的无人机也能够在无地面控制点约束的情况下满足地貌位错测量基本需求。Abstract:
Objective In recent years, UAV (Unmanned Aerial Vehicle) SfM (Structure from Motion) technology has been widely applied as an emerging high-precision 3D topographic data acquisition technique in active tectonics research. However, existing domestic research primarily focuses on UAV platforms without RTK/PPK modules. Over the past two years, RTK and PPK technologies have gradually been introduced to UAV platforms, resulting in changes to field data collection and in-office data processing workflows compared to traditional UAV platforms without RTK/PPK modules. The differences in topographic data quality obtained through SfM processing of aerial photographs from UAV platforms equipped and not equipped with RTK/PPK modules under the same scenes and collection conditions still require investigation. Methods To address these questions and establish a streamlined data collection and processing workflow for different UAV platforms, a site where alluvial terraces are offset by the sinistral Longmu Co fault, northwestern Qinghai-Tibet Plateau, was surveyed using the DJI M300 RTK UAV (equipped with the Zenmuse L1 LiDAR and a 20-megapixel visible light camera) and the DJI Phantom 4 Pro UAV (equipped with a 20-megapixel visible light camera). Through processing the raw data with SfM technology, high-resolution and high-precision DEM and DOM data were obtained for the study area. Additionally, 16 ground control points (checkpoints) were uniformly distributed in the research area, and their coordinates were measured using the Trimble R8 GNSS receiver in RTK mode to compare and validate the differences in data quality obtained by the two platforms. Results The data comparison showed that the visible light camera and LiDAR module carried by the M300 RTK demonstrated high accuracy, with root mean square errors (RMSEs) in the centimeter to decimeter range compared to the RTK-measured ground checkpoints. Compared to SfM data collected at the same time (RMSEX=0.176, RMSEY=0.099, RMSEZ=0.180, RMSEH=0.201, RMSE3D=0.270, unit: m), the Zenmuse L1 LiDAR data exhibited slightly higher accuracy (RMSEX=0.112, RMSEY=0.076, RMSEZ=0.111, RMSEH=0.135, RMSE3D=0.174, unit: m). The uncorrected SfM data from the Phantom 4 Pro had horizontal errors of approximately 1 meter (RMSEX=1.112, RMSEY=1.295, unit: m) and a vertical error of over 200 meters (RMSEZ=249.286, unit: m). After ground control point correction, the accuracy of the Phantom 4 Pro SfM data significantly improved, with RMSE of 0.046 m, 0.058 m, and 0.527 m in the X, Y, and Z directions, respectively. Further analysis of a topographic profile nearly perpendicular to the steep slopes of various terrace risers within the surveyed area revealed that, despite significant elevation discrepancies in the uncorrected Phantom 4 Pro SfM data, it still accurately reflected the relative topographic relief. Subtracting the profile elevation values from their corresponding RMSE, the profile shape closely matched the rest of the data. Based on the acquired DEM data, the displacement of the terrace at this location was measured using LaDiCaoz software, revealing a left-lateral strike-slip displacement of 122.5±5 m and a vertical displacement of 0.8±0.2 m. Conclusion The study results indicate that: (1) UAV SfM method and LiDAR technology have significantly improved the resolution of DOM and DEM, enabling more detailed interpretation and analysis of active faults and related structural landforms; (2) RTK SfM technology overcomes the limitations of using ground control points, providing a higher-precision and more efficient solution for micro-landform measurements in the field of active tectonics research; (3) when absolute three-dimensional coordinates in the study area are not crucial, and only relative terrain variations are required, UAVs without RTK modules can still meet the basic requirements for geomorphic fault displacement measurements in the absence of ground control point constraints; (4) combining UAV SfM technology with traditional fault geomorphology analysis and Quaternary dating techniques in high-precision quantitative active tectonics research can offer robust technical support for analyzing fault activity patterns, seismic hazard, landform evolution, and the occurrence patterns of geological disasters. Significance Through the aforementioned work, workflows for data collection, data processing, and geomorphic fault displacement measurement using SfM methods in active tectonics research were established for both UAV platforms equipped and not equipped with RTK/PPK modules. The fieldwork considerations and data accuracy of UAV SfM methods were analyzed, providing a reference for selecting UAV platforms and rapidly collecting and processing data for similar studies in the future. -

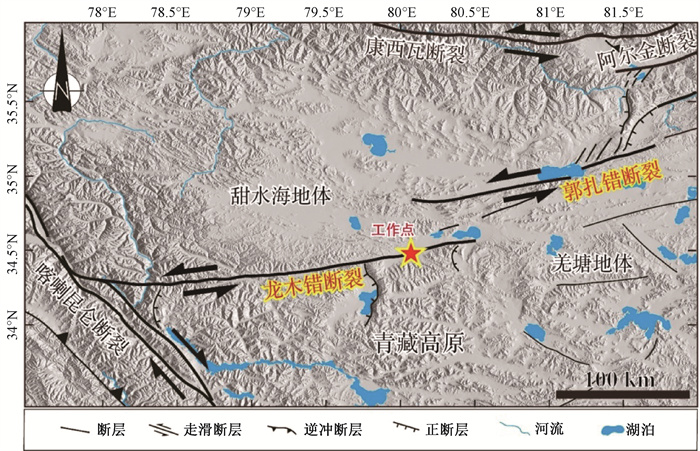
图 1 野外工作点及邻区活动断裂分布图(据Li et al., 2021修改)
Figure 1. Fieldwork locations and distribution of active faults in neighboring areas (modified from Li et al., 2021)

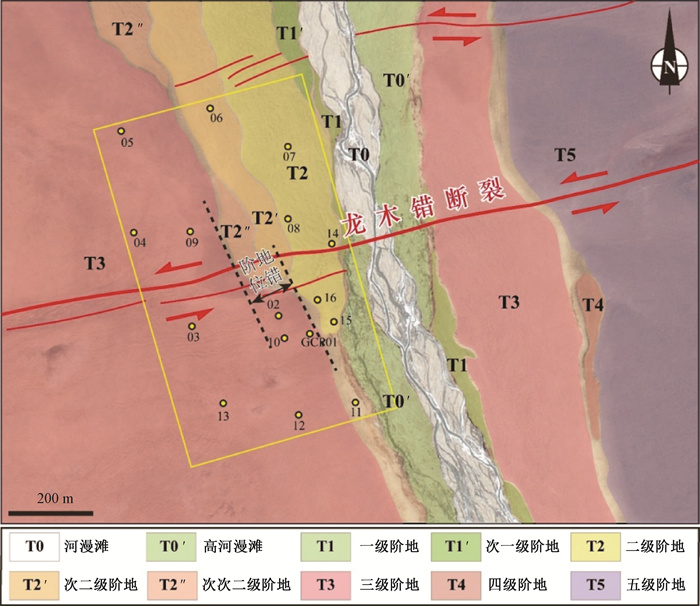
图 2 野外工作点河流阶地左行位错地貌卫星影像解译图(据Chevalier et al., 2017修改)
红色线指示活动断层迹线;黄色方框为无人机航测范围;黄色圆圈及对应的数字表示地面控制点位置及其编号
Figure 2. Interpretation of satellite imagery of left-lateral faulted landforms in river terraces at fieldwork locations (modified from Chevalier et al., 2017)
The red lines indicate the traces of active faults, the yellow boxes represent the coverage area of the UAV aerial survey, and the yellow circles with corresponding numbers indicate the positions of ground control points and their identifiers.

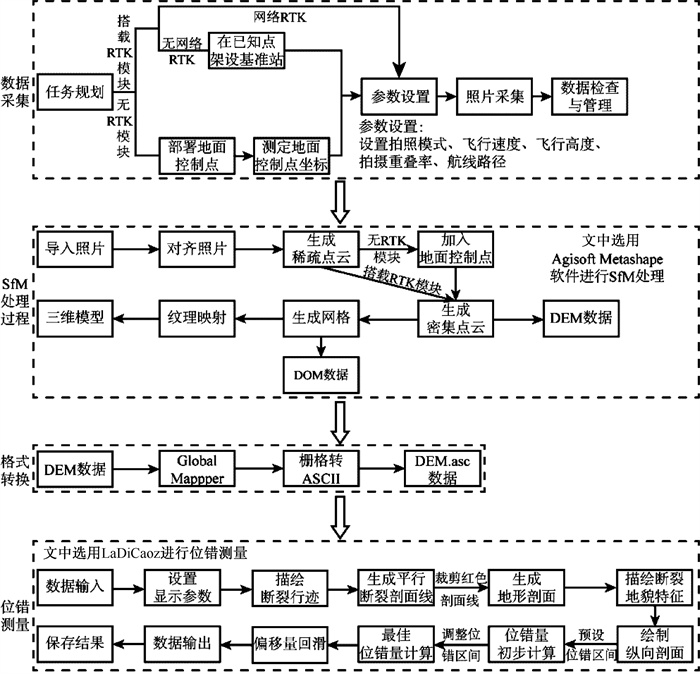
图 3 应用UAV SfM方法开展活动构造研究数据采集、数据处理、位错测量流程图
Figure 3. Flowchart of data collection, data processing, and fault displacement measurement process for active tectonics research using UAV SfM method

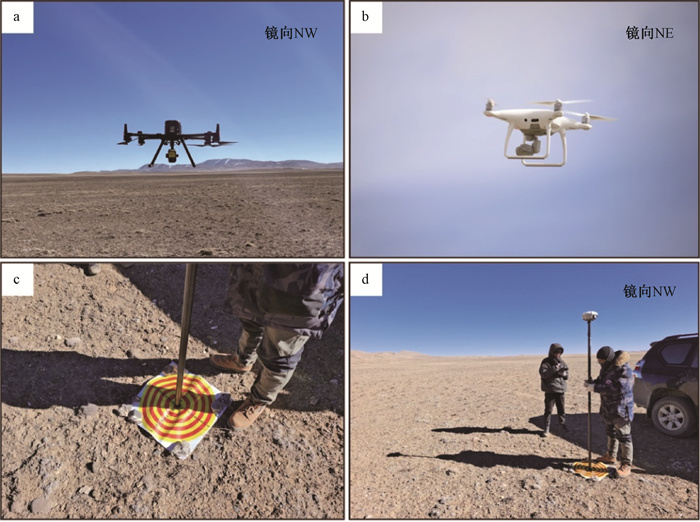
图 4 无人机数据采集系统及地面控制点的布置与测量
a—大疆经纬M 300 RTK无人机及禅思L1负载;b—大疆精灵4 Pro无人机;c—地面控制点标靶;d—地面控制点坐标RTK测量
Figure 4. UAV data acquisition system and deployment and measurement of ground control points
(a) DJI Matrice M300 RTK UAV equipped with Zenmuse L1 payload; (b) DJI Phantom 4 Pro UAV; (c) Ground control point target; (d) Ground control point coordinates measured by RTK

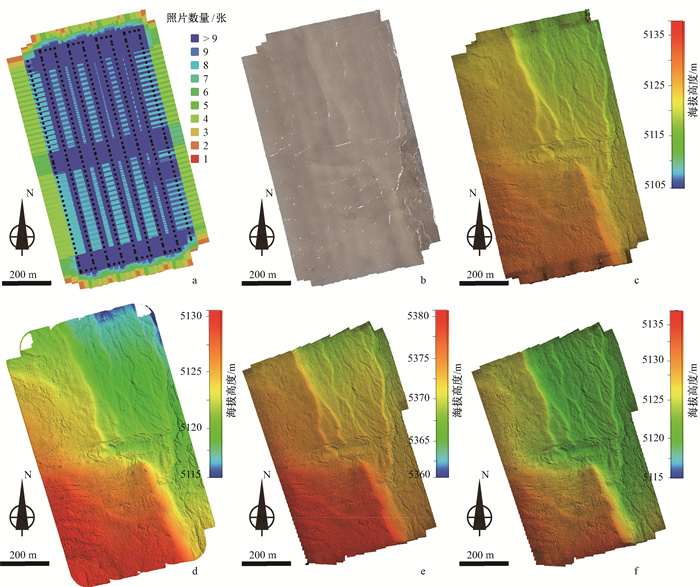
图 5 测区UAV SfM及LiDAR成果图
a—M 300 RTK无人机航测照片重叠度示意图;b—M 300 RTK SfM方法处理获得的测区DOM图像;c—M 300 RTK SfM方法处理获得的测区DEM图像;d—禅思L1 LiDAR获得的测区DEM图像;e—未使用地面控制点校正的精灵4 Pro SfM方法获得的测区DEM图像;f—经地面控制点校正过后的精灵4 Pro SfM方法获得的测区DEM图像
Figure 5. Result Maps of UAV SfM and LiDAR
(a) Overlap of aerial survey photos taken by the M300 RTK UAV; (b) Digital Orthophoto Map (DOM) of the surveyed area obtained by M300 RTK SfM method; (c) Digital Elevation Model (DEM) of the surveyed area obtained by M300 RTK SfM method; (d) DEM of the surveyed area obtained by Zenith L1 LiDAR; (e) DEM of the surveyed area obtained by DJI Phantom 4 Pro using SfM method without ground control point correction; (f) DEM of the surveyed area obtained by DJI Phantom 4 Pro using SfM method after ground control point correction

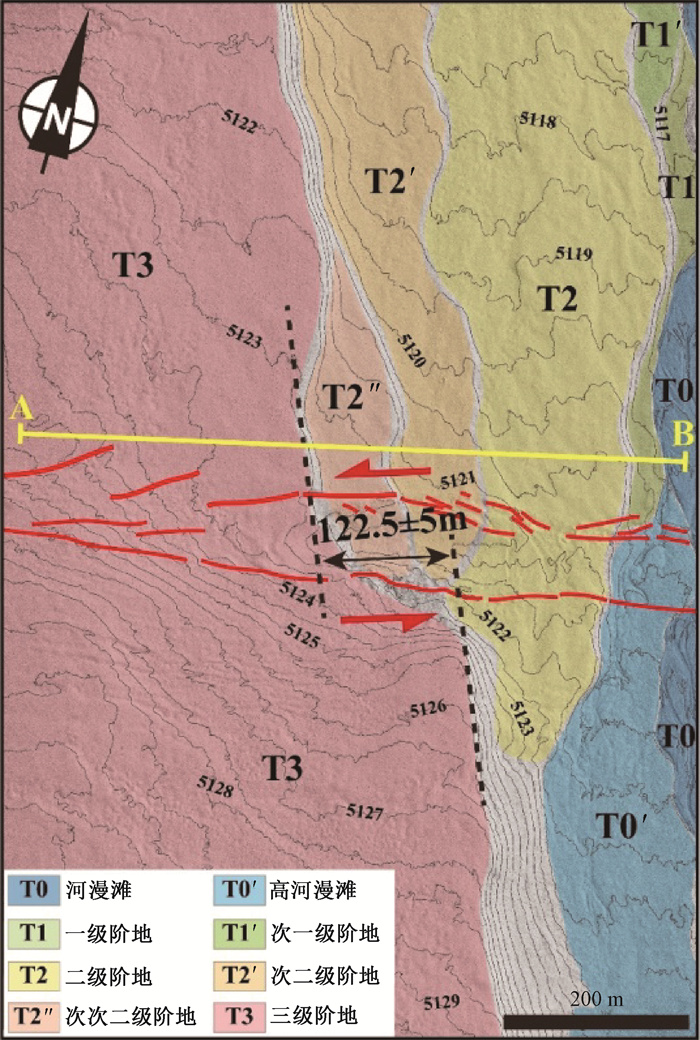
图 6 M 300 RTK UAV SfM方法获得的工作点DOM、DEM综合解译的河流阶地位错地貌图
红色线指示活动断层迹线;黄色线段AB指示图 9中地形剖面位置;灰色细线及对应的数字为等高线及其对应海拔高度;黑色虚线指示T3阶地被断裂错开的标志线,黑色双向箭头及中间数字指示T3阶地位错量
Figure 6. River terrace faulted landform interpreted from the integrated analysis of DOM and DEM obtained by M300 RTK UAV SfM method
The red lines indicate the traces of active faults, the yellow line segment AB indicates the position of the topographic profile in Fig. 9, the gray lines and corresponding numbers represent contour lines and their corresponding elevations, the black dashed lines indicate the marker lines where the T3 terrace is displaced by the fault, and the black bidirectional arrow with the middle numbers indicate the amount of displacement of the T3 terrace.

图 7 M 300 RTK无人机平台SfM数据、LiDAR数据、未经地面控制点校正的精灵4 Pro SfM数据及地面控制点校正后的精灵4 Pro SfM数据与地面检查点差分GPS实测坐标在3个方向上的对比
a—X方向;b—Y方向;c、d—Z方向
Figure 7. Comparison of M300 RTK UAV SfM data, LiDAR data, Phantom 4 Pro SfM data before GCP correction, and Phantom 4 Pro SfM data after GCP correction, with checkpoint coordinates measured by differential GPS, in the X, Y, and Z axes
(a) X direction; (b) Y direction; (c, d) Z direction

图 8 LaDiCaoz软件位错提取过程及结果
a—确定断层迹线、断错地貌标志(阶地陡坎)以及穿过标志物剖面的位置;b—位错恢复后的研究点地貌图;c、d—断裂两侧剖面线地貌标志体拟合前后的相对位置
Figure 8. Process and results of fault displacement extraction using LaDiCaoz software
(a) Locating fault traces, terrace risers, and profile locations; (b) Geomorphological map of the study points after displacement restoration (color legends in Fig 8a and 8b represent changes in terrain elevation); (c, d) Relative positions before and after fitting of geomorphic markers on both sides of the fault

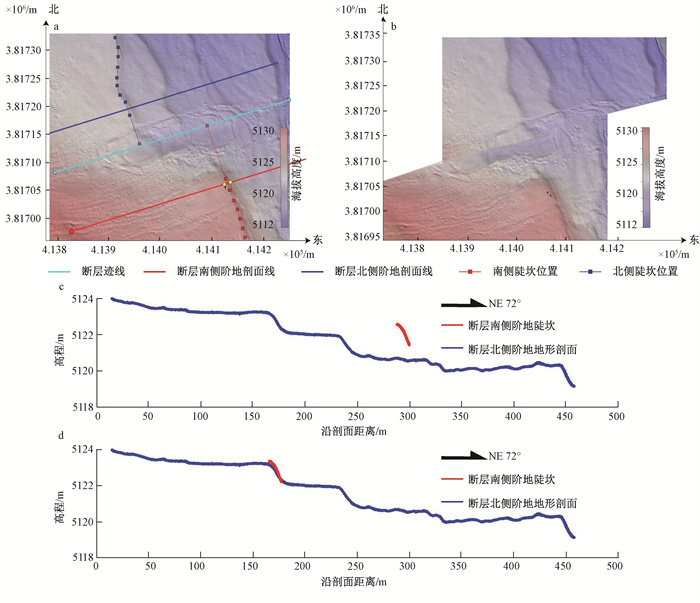
图 9 M 300 RTK无人机平台SfM、LiDAR、精灵4 Pro SfM DEM数据地形剖面对比(剖面位置见图 6)
T0—河漫滩;T1—一级阶地;T2—二级阶地;T2′—次二级阶地;T2″—次次二级阶地;T3—三级阶地
Figure 9. Comparison of topographic profiles of DEM data derived from M 300 RTK UAV SfM, LiDAR, and Phantom 4 Pro SfM (Profile location is shown in Fig. 6)
T0-floodplain; T1-Terrace 1; T2-Terrace 2; T2′-Sub-terrace on Terrace 2; T2″-High sub-terrace on Terrace 2; T3-Terrace 3
表 1 不同类型数据与地面检查点RTK GNSS测量结果对比(单位:m)
Table 1. Comparison of different types of data with ground checkpoints measured with RTK GNSS (unit: m; * denotes points used as GCP during Phatom 4Pro data SfM processing)
地面检查点 经纬M300 SfM 禅思L1 LiDAR 地面控制点校正前精灵4 Pro SfM数据 地面控制点校正后精灵4 Pro SfM数据 DX DY DZ DX DY DZ DX DY DZ DX DY DZ GCP1 -0.078 -0.078 -0.148 0.043 0.043 0.043 -1.082 -0.239 249.443 -0.057 -0.006 1.075 GCP2* -0.035 -0.058 -0.082 0.023 0.023 0.023 -0.940 -0.518 249.408 -0.046 -0.025 0.017 GCP3* 0.258 0.028 -0.141 0.106 0.106 0.106 -0.253 -0.990 248.971 -0.004 -0.076 0.018 GCP4* 0.350 0.058 -0.334 0.166 0.166 0.166 -0.336 -1.944 248.603 -0.002 -0.059 -0.314 GCP5* 0.197 0.169 -0.226 0.008 0.008 0.008 -0.766 -2.731 248.457 0.058 -0.023 0.256 GCP6* -0.026 0.071 -0.149 0.125 0.125 0.125 -1.536 -2.415 249.319 0.057 0.021 -0.185 GCP7* -0.185 -0.040 -0.233 0.016 0.016 0.016 -1.849 -1.721 249.819 0.017 0.072 0.262 GCP8 -0.109 -0.091 -0.125 -0.087 -0.087 -0.087 -1.419 -1.228 249.693 0.104 0.026 -1.060 GCP9 0.189 0.028 -0.100 0.135 0.135 0.135 -0.730 -1.612 249.086 0.049 -0.007 -0.592 GCP10 -0.015 -0.069 -0.070 0.064 0.064 0.064 -0.833 -0.229 249.390 0.017 0.103 0.422 GCP11* -0.081 -0.191 -0.184 -0.054 -0.054 -0.054 -1.113 0.533 249.263 -0.037 0.113 -0.317 GCP12* 0.103 -0.125 -0.104 0.124 0.124 0.124 -0.524 0.280 249.127 -0.032 -0.035 0.517 GCP13* 0.224 -0.027 -0.187 0.183 0.183 0.183 -0.081 -0.250 248.951 -0.002 -0.101 -0.058 GCP14* -0.236 -0.119 -0.251 -0.018 -0.018 -0.018 -1.704 -0.796 249.809 0.032 0.009 0.066 GCP15 -0.167 -0.107 -0.199 0.031 0.031 0.031 -1.313 -0.179 249.523 0.040 0.023 -0.619 GCP16 -0.157 -0.121 -0.122 -0.122 -0.122 -0.122 -1.340 -0.486 249.608 0.050 -0.029 -0.785 注:*为精灵4 Pro数据SfM处理过程中的地面控制点  下载: 导出CSV
下载: 导出CSV
表 2 不同类型数据在X、Y和Z轴方向的平均误差与均方根误差(单位:m)
Table 2. Mean error and root mean square error (RMSE) in X, Y, and Z axes for different types of data (unit: m)
X轴平均误差 Y轴平均误差 Z轴平均误差 RMSEX RMSEY RMSEZ RMSEH RMSE3D 经纬M300 SfM 0.151 0.086 0.166 0.176 0.099 0.180 0.201 0.270 禅思L1 LiDAR 0.096 0.051 0.103 0.112 0.076 0.111 0.135 0.174 校正前精灵4 Pro SfM 0.989 1.009 249.279 1.112 1.295 249.280 1.707 249.286 校正后精灵4 Pro SfM 0.038 0.046 0.410 0.046 0.058 0.527 0.073 0.532
下载: 导出CSV
-
AGÜERA-VEGA F, CARVAJAL-RAMÍREZ F, MARTÍNEZ-CARRICONDO P, 2017. Accuracy of digital surface models and orthophotos derived from unmanned aerial vehicle photogrammetry[J]. Journal of Surveying Engineering, 143(2): 04016025. doi: 10.1061/(ASCE)SU.1943-5428.0000206 ARMIJO R, TAPPONNIER P, HAN T L, 1989. Late Cenozoic right-lateral strike-slip faulting in southern Tibet[J]. Journal of Geophysical Research: Solid Earth, 94(B3): 2787-2838. doi: 10.1029/JB094iB03p02787 BEMIS S P, MICKLETHWAITE S, TURNER D, et al., 2014. Ground-based and UAV-based photogrammetry: a multi-scale, high-resolution mapping tool for structural geology and paleoseismology[J]. Journal of Structural Geology, 69: 163-178. doi: 10.1016/j.jsg.2014.10.007 BI H Y, ZHENG W J, REN Z K, et al., 2017. Using an unmanned aerial vehicle for topography mapping of the fault zone based on structure from motion photogrammetry[J]. International Journal of Remote Sensing, 38(8-10): 2495-2510. doi: 10.1080/01431161.2016.1249308 BI H Y, ZHENG W J, ZENG J Y, et al., 2017. Application of SfM photogrammetry method to the quantitative study of active tectonics[J]. Seismology and Geology, 39(4): 656-674. (in Chinese with English abstract) doi: 10.3969/j.issn.0253-4967.2017.04.003 CAO P J, CHENG S Y, LIN H X, et al., 2021. DEM in quantitative analysis of structural geomorphology: application and prospect[J]. Journal of Geomechanics, 27(6): 949-962. (in Chinese with English abstract) CHEN X Y, SHI Y Z, YANG Y, et al., 2023. Accuracy evaluation of structure from motion (SfM) photogrammetry on the measurement of typical gullies in the Loess Plateau[J]. Journal of Shaanxi Normal University (Natural Science Edition), 51(6): 25-36. (in Chinese with English abstract) CHEVALIER M L, PAN J W, LI H B, et al., 2017. First tectonic-geomorphology study along the Longmu-Gozha Co fault system, western Tibet[J]. Gondwana Research, 41: 411-424. doi: 10.1016/j.gr.2015.03.008 DENG Q D, CHEN L C, RAN Y K, 2004. Quantitative studies and applications of active tectonics[J]. Earth Science Frontiers, 11(4): 383-392. (in Chinese with English abstract) FONSTAD M A, DIETRICH J T, COURVILLE B C, et al., 2013. Topographic structure from motion: a new development in photogrammetric measurement[J]. Earth Surface Processes and Landforms, 38(4): 421-430. doi: 10.1002/esp.3366 GUO Q H, HU T Y, LIU J, et al., 2021. Advances in light weight unmanned aerial vehicle remote sensing and major industrial applications[J]. Progress in Geography, 40(9): 1550-1569. (in Chinese with English abstract) doi: 10.18306/dlkxjz.2021.09.010 HAN S, WU Z H, WANG S F, et al., 2023. Surface deformation and tectonic implication of the late Quaternary Bue Co strike-slip fault system, mid-western Qiangtang block [J/OL]. Journal of Geomechanics, DOI: 10.12090/j.issn.1006-6616.2023086 (in Chinese with English abstract).HARWIN S, LUCIEER A, 2012. Assessing the accuracy of georeferenced point clouds produced via multi-view stereopsis from unmanned aerial vehicle (UAV) imagery[J]. Remote Sensing, 4(6): 1573-1599. doi: 10.3390/rs4061573 JAMES M R, ROBSON S, 2012. Straightforward reconstruction of 3D surfaces and topography with a camera: accuracy and geoscience application[J]. Journal of Geophysical Research: Earth Surface, 117(F3): F03017. JIMÉNEZ-JIMÉNEZ S I, OJEDA-BUSTAMANTE W, DE JESÚSMARCIAL-PABLO M, et al., 2021. Digital terrain models generated with low-cost UAV photogrammetry: methodology and accuracy[J]. ISPRS International Journal of Geo-Information, 10(5): 285. doi: 10.3390/ijgi10050285 JOHNSON K, NISSEN E, SARIPALLI S, et al., 2014. Rapid mapping of ultrafine fault zone topography with structure from motion[J]. Geosphere, 10(5): 969-986. doi: 10.1130/GES01017.1 KANG W J, XU X W, YU G H, et al., 2020. Comparison study of two kinds of codes to measure fault-offsets based on matlab: a case study on eastern Altyn Tagh Fault[J]. Seismology and Geology, 42(3): 732-747. (in Chinese with English abstract) doi: 10.3969/j.issn.0253-4967.2020.03.013 KOZMUS TRAJKOVSKI K, GRIGILLO D, PETROVIČ D, 2020. Optimization of UAV flight missions in steep terrain[J]. Remote Sensing, 12(8): 1293. doi: 10.3390/rs12081293 LI H, CHEVALIER M L, TAPPONNIER P, et al., 2021. Block tectonics across western Tibet and multi-millennial recurrence of great earthquakes on the Karakax Fault[J]. Journal of Geophysical Research: Solid Earth, 126(12): e2021JB022033. doi: 10.1029/2021JB022033 LI H Q, YUAN D Y, SU Q, et al., 2023. Geomorphic features of the Menyuan basin in the Qilian Mountains and its tectonic significance[J]. Journal of Geomechanics, 29(6): 824-841. LIAO C, LIANG M J, ZHOU W Y, et al., 2024. Quantitative parameter extraction of seismic surface rupture based on SfM method and LaDiCaoz: take the typical surface rupture in Luho Zhajiao Village Area as an example[J]. Journal of Geodesy and Geodynamics, 44(2): 183-188. (in Chinese with English abstract) MA X X, WU Z H, LI J C, 2016. LiDAR technology and its application and prospect in geological environment[J]. Journal of Geomechanics, 22(1): 93-103. (in Chinese with English abstract) MICHELETTI N, CHANDLER J H, LANE S N, 2015. Investigating the geomorphological potential of freely available and accessible structure-from-motion photogrammetry using a smartphone[J]. Earth Surface Processes and Landforms, 40(4): 473-486. doi: 10.1002/esp.3648 MOREELS P, PERONA P, 2007. Evaluation of features detectors and descriptors based on 3D objects[J]. International Journal of Computer Vision, 73(3): 263-284. doi: 10.1007/s11263-006-9967-1 NESBIT P R, HUGENHOLTZ C H, 2019. Enhancing UAV-SFM 3D model accuracy in high-relief landscapes by incorporating oblique images[J]. Remote Sensing, 11(3): 239. doi: 10.3390/rs11030239 OSKIN M E, LE K, STRANE M D, 2007. Quantifying fault-zone activity in arid environments with high-resolution topography[J]. Geophysical Research Letters, 34(23): L23S05. PERRIN C, MANIGHETTI I, AMPUERO J P, et al., 2016. Location of largest earthquake slip and fast rupture controlled by along‐strike change in fault structural maturity due to fault growth[J]. Journal of Geophysical Research: Solid Earth, 121(5): 3666-3685. doi: 10.1002/2015JB012671 RATERMAN N S, COWGILL E, LIN D, 2007. Variable structural style along the Karakoram fault explained using triple-junction analysis of intersecting faults[J]. Geosphere, 3(2): 71-85. doi: 10.1130/GES00067.1 REN Z K, CHEN T, ZHANG H P, et al., 2014. LiDAR survey in active tectonics studies: an introduction and overview[J]. Acta Geologica Sinica, 88(6): 1196-1207. (in Chinese with English abstract) ROSAS M A, CLAPUYT F, VIVEEN W, et al., 2023. Quantifying geomorphic change in Andean river valleys using UAV-PPK-SfM techniques: an example from the western Peruvian Andes[J]. Geomorphology, 435: 108766. doi: 10.1016/j.geomorph.2023.108766 ROSNELL T, HONKAVAARA E, 2012. Point cloud generation from aerial image data acquired by a quadrocopter type micro unmanned aerial vehicle and a digital still camera[J]. Sensors, 12(1): 453-480. doi: 10.3390/s120100453 SANZ-ABLANEDO E, CHANDLER J H, RODRÍGUEZ-PÉREZ J R, et al., 2018. Accuracy of Unmanned Aerial Vehicle (UAV) and SfM photogrammetry survey as a function of the number and location of ground control points used[J]. Remote Sensing, 10(10): 1606. doi: 10.3390/rs10101606 SEFERCIK U G, NAZAR M, 2023. Consistency analysis of RTK and Non-RTK UAV DSMs in vegetated areas[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 16: 5759-5768. doi: 10.1109/JSTARS.2023.3288947 SIMIC MILAS A, CRACKNELL A P, WARNER T A, 2018. Drones-the third generation source of remote sensing data[J]. International Journal of Remote Sensing, 39(21): 7125-7137. doi: 10.1080/01431161.2018.1523832 TURNER D, LUCIEER A, WATSON C, 2012. An automated technique for generating georectified mosaics from ultra-high resolution Unmanned Aerial Vehicle (UAV) imagery, based on Structure from Motion (SfM) point clouds[J]. Remote Sensing, 4(5): 1392-1410. doi: 10.3390/rs4051392 THOMAS A F, AMY E F, ADAM J M, et al., 2020. Impacts of abrupt terrain changes and grass cover on vertical accuracy of UAS-SfM derived elevation models[J]. Papers in Applied Geography, 6(4): 336-51. doi: 10.1080/23754931.2020.1782254 WANG J W, LI C L, WANG Z Y, et al., 2021. Analysis on the influence of images on measurement accuracy of three-dimensional model reconstructed by SFM[J]. Laser Journal, 42(3): 63-69. (in Chinese with English abstract) WANG P T, SHAO Y X, ZHANG H P, et al., 2016. The application of sUAV photogrammetry in active tectonics: Shanmagou site of Haiyuan Fault, for example[J]. Quaternary Sciences, 36(2): 433-442. (in Chinese with English abstract) WESTOBY M J, BRASINGTON J, GLASSER N F, et al., 2012. 'Structure-from-Motion' photogrammetry: a low-cost, effective tool for geoscience applications[J]. Geomorphology, 179: 300-314. doi: 10.1016/j.geomorph.2012.08.021 YANG H B, YANG X P, HUANG X N, et al., 2016. Data comparative analysis between SfM data and DGPs data: a case study from fault scarp in the East Bank of Hongshuiba River, northern margin of the Qilian Shan[J]. Seismology and Geology, 38(4): 1030-1046. (in Chinese with English abstract) ZHANG D, LI J C, WU Z H, et al., 2021. Using terrestrial LiDAR to accurately measure the micro-geomorphologic geometry of active fault: a case study of fault scarp on the Maoyaba Fault zone[J]. Journal of Geomechanics, 27(1): 63-72. (in Chinese with English abstract) ZHANG H P, LIU S F, SUN Y P, et al., 2006. The acquisition of local topographic relief and its application: an SRTM-DEM analysis[J]. Remote Sensing for Land & Resources, (1): 31-35. (in Chinese with English abstract) ZIELKE O, ARROWSMITH J R, 2012. LaDiCaoz and LiDARimager—MATLAB GUIs for LiDAR data handling and lateral displacement measurement[J]. Geosphere, 8(1): 206-221. doi: 10.1130/GES00686.1 毕海芸, 郑文俊, 曾江源, 等, 2017. SfM摄影测量方法在活动构造定量研究中的应用[J]. 地震地质, 39(4): 656-674. https://www.cnki.com.cn/Article/CJFDTOTAL-DZDZ201704003.htm 曹鹏举, 程三友, 林海星, 等, 2021. DEM在构造地貌定量分析中的应用与展望[J]. 地质力学学报, 27(6): 949-962. doi: 10.12090/j.issn.1006-6616.2021.27.06.077?viewType=HTML 陈薪伊, 史扬子, 杨扬, 等, 2023. SfM摄影测量法对黄土高原典型切沟的测量精度评价[J]. 陕西师范大学学报(自然科学版), 51(6): 25-36. https://www.cnki.com.cn/Article/CJFDTOTAL-SXSZ202306003.htm 邓起东, 陈立春, 冉勇康, 2004. 活动构造定量研究与应用[J]. 地学前缘, 11(4): 383-392. https://www.cnki.com.cn/Article/CJFDTOTAL-DXQY200404006.htm 郭庆华, 胡天宇, 刘瑾, 等, 2021. 轻小型无人机遥感及其行业应用进展[J]. 地理科学进展, 40(9): 1550-1569. https://www.cnki.com.cn/Article/CJFDTOTAL-DLKJ202109011.htm 韩帅, 吴中海, 王世锋, 等, 2023. 羌塘地块中西部布木错走滑断裂系晚第四纪以来地表变形特征与构造意义[J/OL]. 地质力学学报, DOI: 10.12090/j.issn.1006-6616.2023086 .康文君, 徐锡伟, 于贵华, 等, 2020. 2种基于Matlab平台的断层位移测量软件对比分析: 以阿尔金断裂东段为例[J]. 地震地质, 42(3): 732-747. https://www.cnki.com.cn/Article/CJFDTOTAL-DZDZ202003013.htm 李红强, 袁道阳, 苏琦, 等, 2023. 祁连山内部门源盆地地貌特征及构造意义[J]. 地质力学学报, 29(6): 824-841. doi: 10.12090/j.issn.1006-6616.2023123?viewType=HTML 廖程, 梁明剑, 周文英, 等, 2024. 基于无人机SfM及LaDiCaoz的地震地表破裂定量参数提取: 以炉霍扎交村一带地震典型地表破裂为例[J]. 大地测量与地球动力学, 44(2): 183-188. https://www.cnki.com.cn/Article/CJFDTOTAL-DKXB202402014.htm 马晓雪, 吴中海, 李家存, 2016. LiDAR技术在地质环境中的主要应用与展望[J]. 地质力学学报, 22(1): 93-103. https://journal.geomech.ac.cn/article/id/0f502c82-0ca8-4348-9b7a-ba4406be4e74?viewType=HTML 任治坤, 陈涛, 张会平, 等, 2014. LiDAR技术在活动构造研究中的应用[J]. 地质学报, 88(6): 1196-1207. https://www.cnki.com.cn/Article/CJFDTOTAL-DZXE201406019.htm 王佳文, 李彩林, 王志勇, 等, 2021. 影像数量对SFM三维重建模型测量精度的影响分析[J]. 激光杂志, 42(3): 63-69. https://www.cnki.com.cn/Article/CJFDTOTAL-JGZZ202103012.htm 王朋涛, 邵延秀, 张会平, 等, 2016. sUAV摄影技术在活动构造研究中的应用: 以海原断裂骟马沟为例[J]. 第四纪研究, 36(2): 433-442. https://www.cnki.com.cn/Article/CJFDTOTAL-DSJJ201602018.htm 杨海波, 杨晓平, 黄雄南, 等, 2016. 移动摄影测量数据与差分GPS数据的对比分析: 以祁连山北麓洪水坝河东岸断层陡坎为例[J]. 地震地质, 38(4): 1030-1046. https://www.cnki.com.cn/Article/CJFDTOTAL-DZDZ201604018.htm 张迪, 李家存, 吴中海, 等, 2021. 利用地面LiDAR精细化测量活断层微地貌形态: 以毛垭坝断裂禾尼处断层崖为例[J]. 地质力学学报, 27(1): 63-72. doi: 10.12090/j.issn.1006-6616.2021.27.01.007?viewType=HTML 张会平, 刘少峰, 孙亚平, 等, 2006. 基于SRTM-DEM区域地形起伏的获取及应用[J]. 国土资源遥感, (1): 31-35. https://www.cnki.com.cn/Article/CJFDTOTAL-GTYG200601006.htm -

 下载:
下载:



计量
- 文章访问数: 1408
- HTML全文浏览量: 494
- PDF下载量: 112
- 被引次数: 0
